Air–ground teamed autonomy research at the George H.W. Bush Combat Development Complex develops heterogeneous multi-robot systems (MRS) of air and ground vehicles designed to operate alongside humans in complex mission environments. Leveraging the Integration Proving Ground (IPG), these systems are developed and evaluated under realistic conditions to enhance soldier effectiveness and safety.
Objective
To advance multi-robot teaming for national security applications through:
- Improved situational awareness and decision support
- Increased human effectiveness and efficiency
- Reduced risk by moving humans further from danger
- Scalable autonomy enabling higher robot-to-operator ratios
Capabilities
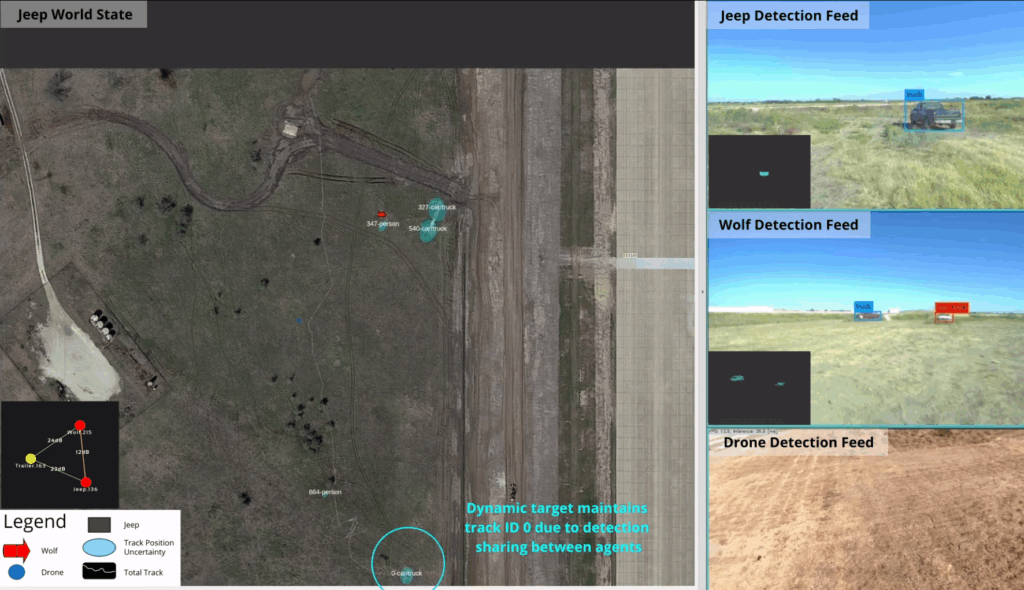
Collaborative Situational Awareness
- Multi-robot multi-target tracking (MR-MTT), or multi-robot multi-object trajectory estimation (MOTE)
- Multi-robot semantic mapping, information sharing, and coordinated planning
Physical Coordination of Robots
- Extreme terrain operation and recovery (ExTOR)
- Coordinated take-off and landing (CTOL) of aerial vehicles on ground vehicles

Robust Autonomy in Challenging Environments
- Mitigation of unreliable communications and degraded Global Navigation Satellite System (GNSS) signals
- Fault tolerance for hardware degradation and failure

Air–Ground Teamed Autonomy